我正在尝试使用重叠很少的图像创建全景图,但我知道相机的角度,所以我确切知道有多少重叠,我知道图像的顺序所以我知道每个图像属于哪里全景。 作为第一步,我只是简单地将图像连接在一起,但结果还不够好。 有没有办法将位图裁剪成梯形以消除(大部分)重叠,然后在连接之前将位图拉伸(stretch)回矩形? 我知道这会在拉伸(stretch)过程中产生变形,并且梯形只是近似于位图实际需要裁剪的方式,但我希望这已经足够好了。
最佳答案
您正在寻找的技术称为 Image Registration使用仿射变换。这可以在软件中通过计算将图像 B 映射到图像 A 的矩阵变换来实现。我假设您正尝试在使用 Windows 窗体和 GDI+ 的软件中执行此操作?那么您可用的矩阵是 3x3 矩阵,能够缩放、平移、旋转和倾斜。这通常足以创建简单的图像配准,我在商业软件包中成功地使用了这种技术(但是是 WPF)。
要使用仿射变换实现图像配准,首先需要配准一对图像中的一组控制点。由此我们可以计算 2D 变换来配准图像?我在 WPF 中完成了此操作,它有一个 3x3 矩阵,可以使用 System.Windows.Media.Matrix 类定义,该类具有以下构造函数:
Matrix(double m11, double m12, double m21, double m22,
double offsetX, double offsetY)
注意:GDI+有一个Matrix类,其构造函数可能不同,但原理是一样的
构造函数参数组成矩阵如下:
M11 M12 0 M21 M22 0 OffsetX OffsetY 1
Now if the input points are called X,Y and output U,V, the affine matrix transform, T, that maps X,Y onto U,V can be computed as follows:
U = X * T [U1 V1 1] = [X1 Y1 1] [A B 0] [U2 V2 1] = [X2 Y2 1] * [C D 0] [U3 V3 1] = [X3 Y3 1] [Tx Ty 1]
This can also be simplified as follows:
U = X * T [U1 V1] = [X1 Y1 1] [A B ] [U2 V2] = [X2 Y2 1] * [C D ] [U3 V3] = [X3 Y3 1] [Tx Ty]
or
X^-1 * U = T [X1 Y1 1]^-1 [U1 V1] [A B ] [X2 Y2 1] * [U2 V2] = [C D ] [X3 Y3 1] [U3 V3] [Tx Ty]
In english what this means is, given a list of points X,Y in image 1 that correspond to image 2, the inverse of the matrix X containing XY points multiplied by the matrix of corresponding points in image 2 gives you your matrix transform from Image 1 to 2
The output transform T contains A,B,C,D and Tx,Ty which correspond to M11,M12,M21,M22,OffsetX,OffsetY in the 3x3 affine matrix class (constructor above). However, if the X matrix and U matrix have more than 3 points, the solution is overdetermined and a least squares fit must be found. This is acheived using the Moores-Penrose Psuedo-inverse to find X^-1.
What does this mean in code? Well I coded my own Matrix3x3, Matrix3x2 classes and Control Point (x,y point) to handle the transformation then applied this to a WPF MatrixTransform on an element. In GDI+ you can do the same by applying the Matrix to the graphics pipeline before calling Graphics.DrawImage. Let's see how we can compute the transformation matrix.
The first class we need is the Matrix3x3 class:
public class Matrix3x3 : ICloneable
{
#region Local Variables
private double [] coeffs;
private const int _M11 = 0;
private const int _M12 = 1;
private const int _M13 = 2;
private const int _M21 = 3;
private const int _M22 = 4;
private const int _M23 = 5;
private const int _M31 = 6;
private const int _M32 = 7;
private const int _M33 = 8;
#endregion
#region Construction
/// <summary>
/// Initializes a new instance of the <see cref="Matrix3x3"/> class.
/// </summary>
public Matrix3x3()
{
coeffs = new double[9];
}
/// <summary>
/// Initializes a new instance of the <see cref="Matrix3x3"/> class.
/// </summary>
/// <param name="coefficients">The coefficients to initialise. The number of elements of the array should
/// be equal to 9, else an exception will be thrown</param>
public Matrix3x3(double[] coefficients)
{
if (coefficients.GetLength(0) != 9)
throw new Exception("Matrix3x3.Matrix3x3()", "The number of coefficients passed in to the constructor must be 9");
coeffs = coefficients;
}
/// <summary>
/// Initializes a new instance of the <see cref="Matrix3x3"/> class.
/// </summary>
/// <param name="m11">The M11 coefficient</param>
/// <param name="m12">The M12 coefficien</param>
/// <param name="m13">The M13 coefficien</param>
/// <param name="m21">The M21 coefficien</param>
/// <param name="m22">The M22 coefficien</param>
/// <param name="m23">The M23 coefficien</param>
/// <param name="m31">The M31 coefficien</param>
/// <param name="m32">The M32 coefficien</param>
/// <param name="m33">The M33 coefficien</param>
public Matrix3x3(double m11, double m12, double m13, double m21, double m22, double m23, double m31, double m32, double m33)
{
// The 3x3 matrix is constructed as follows
//
// | M11 M12 M13 |
// | M21 M22 M23 |
// | M31 M32 M33 |
coeffs = new double[] { m11, m12, m13, m21, m22, m23, m31, m32, m33 };
}
/// <summary>
/// Initializes a new instance of the <see cref="Matrix3x3"/> class. The IAffineTransformCoefficients
/// passed in is used to populate coefficients M11, M12, M21, M22, M31, M32. The remaining column (M13, M23, M33)
/// is populated with homogenous values 0 0 1.
/// </summary>
/// <param name="affineMatrix">The IAffineTransformCoefficients used to populate M11, M12, M21, M22, M31, M32</param>
public Matrix3x3(IAffineTransformCoefficients affineTransform)
{
coeffs = new double[] { affineTransform.M11, affineTransform.M12, 0,
affineTransform.M21, affineTransform.M22, 0,
affineTransform.OffsetX, affineTransform.OffsetY, 1};
}
#endregion
#region Public Properties
/// <summary>
/// Gets or sets the M11 coefficient
/// </summary>
/// <value>The M11</value>
public double M11
{
get
{
return coeffs[_M11];
}
set
{
coeffs[_M11] = value;
}
}
/// <summary>
/// Gets or sets the M12 coefficient
/// </summary>
/// <value>The M12</value>
public double M12
{
get
{
return coeffs[_M12];
}
set
{
coeffs[_M12] = value;
}
}
/// <summary>
/// Gets or sets the M13 coefficient
/// </summary>
/// <value>The M13</value>
public double M13
{
get
{
return coeffs[_M13];
}
set
{
coeffs[_M13] = value;
}
}
/// <summary>
/// Gets or sets the M21 coefficient
/// </summary>
/// <value>The M21</value>
public double M21
{
get
{
return coeffs[_M21];
}
set
{
coeffs[_M21] = value;
}
}
/// <summary>
/// Gets or sets the M22 coefficient
/// </summary>
/// <value>The M22</value>
public double M22
{
get
{
return coeffs[_M22];
}
set
{
coeffs[_M22] = value;
}
}
/// <summary>
/// Gets or sets the M23 coefficient
/// </summary>
/// <value>The M23</value>
public double M23
{
get
{
return coeffs[_M23];
}
set
{
coeffs[_M23] = value;
}
}
/// <summary>
/// Gets or sets the M31 coefficient
/// </summary>
/// <value>The M31</value>
public double M31
{
get
{
return coeffs[_M31];
}
set
{
coeffs[_M31] = value;
}
}
/// <summary>
/// Gets or sets the M32 coefficient
/// </summary>
/// <value>The M32</value>
public double M32
{
get
{
return coeffs[_M32];
}
set
{
coeffs[_M32] = value;
}
}
/// <summary>
/// Gets or sets the M33 coefficient
/// </summary>
/// <value>The M33</value>
public double M33
{
get
{
return coeffs[_M33];
}
set
{
coeffs[_M33] = value;
}
}
/// <summary>
/// Gets the determinant of the matrix
/// </summary>
/// <value>The determinant</value>
public double Determinant
{
get
{
// |a b c|
// In general, for a 3X3 matrix |d e f|
// |g h i|
//
// The determinant can be found as follows:
// a(ei-fh) - b(di-fg) + c(dh-eg)
// Get coeffs
double a = coeffs[_M11];
double b = coeffs[_M12];
double c = coeffs[_M13];
double d = coeffs[_M21];
double e = coeffs[_M22];
double f = coeffs[_M23];
double g = coeffs[_M31];
double h = coeffs[_M32];
double i = coeffs[_M33];
double ei = e * i;
double fh = f * h;
double di = d * i;
double fg = f * g;
double dh = d * h;
double eg = e * g;
// Compute the determinant
return (a * (ei - fh)) - (b * (di - fg)) + (c * (dh - eg));
}
}
/// <summary>
/// Gets a value indicating whether this matrix is singular. If it is singular, it cannot be inverted
/// </summary>
/// <value>
/// <c>true</c> if this instance is singular; otherwise, <c>false</c>.
/// </value>
public bool IsSingular
{
get
{
return Determinant == 0;
}
}
/// <summary>
/// Gets the inverse of this matrix. If the matrix is singular, this method will throw an exception
/// </summary>
/// <value>The inverse</value>
public Matrix3x3 Inverse
{
get
{
// Taken from http://everything2.com/index.pl?node_id=1271704
// a b c
//In general, the inverse matrix of a 3X3 matrix d e f
// g h i
//is
// 1 (ei-fh) (bi-ch) (bf-ce)
// ----------------------------- x (fg-di) (ai-cg) (cd-af)
// a(ei-fh) - b(di-fg) + c(dh-eg) (dh-eg) (bg-ah) (ae-bd)
// Get coeffs
double a = coeffs[_M11];
double b = coeffs[_M12];
double c = coeffs[_M13];
double d = coeffs[_M21];
double e = coeffs[_M22];
double f = coeffs[_M23];
double g = coeffs[_M31];
double h = coeffs[_M32];
double i = coeffs[_M33];
//// Compute often used components
double ei = e * i;
double fh = f * h;
double di = d * i;
double fg = f * g;
double dh = d * h;
double eg = e * g;
double bi = b * i;
double ch = c * h;
double ai = a * i;
double cg = c * g;
double cd = c * d;
double bg = b * g;
double ah = a * h;
double ae = a * e;
double bd = b * d;
double bf = b * f;
double ce = c * e;
double cf = c * d;
double af = a * f;
// Construct the matrix using these components
Matrix3x3 tempMat = new Matrix3x3(ei - fh, ch - bi, bf - ce, fg - di, ai - cg, cd - af, dh - eg, bg - ah, ae - bd);
// Compute the determinant
double det = Determinant;
if (det == 0.0)
{
throw new Exception("Matrix3x3.Inverse", "Unable to invert the matrix as it is singular");
}
// Scale the matrix by 1/determinant
tempMat.Scale(1.0 / det);
return tempMat;
}
}
/// <summary>
/// Gets a value indicating whether this matrix is affine. This will be true if the right column
/// (M13, M23, M33) is 0 0 1
/// </summary>
/// <value><c>true</c> if this instance is affine; otherwise, <c>false</c>.</value>
public bool IsAffine
{
get
{
return (coeffs[_M13] == 0 && coeffs[_M23] == 0 && coeffs[_M33] == 1);
}
}
#endregion
#region Public Methods
/// <summary>
/// Multiplies the current matrix by the 3x3 matrix passed in
/// </summary>
/// <param name="rhs"></param>
public void Multiply(Matrix3x3 rhs)
{
// Get coeffs
double a = coeffs[_M11];
double b = coeffs[_M12];
double c = coeffs[_M13];
double d = coeffs[_M21];
double e = coeffs[_M22];
double f = coeffs[_M23];
double g = coeffs[_M31];
double h = coeffs[_M32];
double i = coeffs[_M33];
double j = rhs.M11;
double k = rhs.M12;
double l = rhs.M13;
double m = rhs.M21;
double n = rhs.M22;
double o = rhs.M23;
double p = rhs.M31;
double q = rhs.M32;
double r = rhs.M33;
// Perform multiplication. Formula taken from
// http://www.maths.surrey.ac.uk/explore/emmaspages/option1.html
coeffs[_M11] = a * j + b * m + c * p;
coeffs[_M12] = a * k + b * n + c * q;
coeffs[_M13] = a * l + b * o + c * r;
coeffs[_M21] = d * j + e * m + f * p;
coeffs[_M22] = d * k + e * n + f * q;
coeffs[_M23] = d * l + e * o + f * r;
coeffs[_M31] = g * j + h * m + i * p;
coeffs[_M32] = g * k + h * n + i * q;
coeffs[_M33] = g * l + h * o + i * r;
}
/// <summary>
/// Scales the matrix by the specified scalar value
/// </summary>
/// <param name="scalar">The scalar.</param>
public void Scale(double scalar)
{
coeffs[0] *= scalar;
coeffs[1] *= scalar;
coeffs[2] *= scalar;
coeffs[3] *= scalar;
coeffs[4] *= scalar;
coeffs[5] *= scalar;
coeffs[6] *= scalar;
coeffs[7] *= scalar;
coeffs[8] *= scalar;
}
/// <summary>
/// Makes the matrix an affine matrix by setting the right column (M13, M23, M33) to 0 0 1
/// </summary>
public void MakeAffine()
{
coeffs[_M13] = 0;
coeffs[_M23] = 0;
coeffs[_M33] = 1;
}
#endregion
#region ICloneable Members
/// <summary>
/// Creates a new object that is a copy of the current instance.
/// </summary>
/// <returns>
/// A new object that is a copy of this instance.
/// </returns>
public object Clone()
{
double[] coeffCopy = (double[])coeffs.Clone();
return new Matrix3x3(coeffCopy);
}
#endregion
#region IAffineTransformCoefficients Members
//
// NB: M11, M12, M21, M22 members of IAffineTransformCoefficients are implemented within the
// #region Public Properties directive
//
/// <summary>
/// Gets or sets the Translation Offset in the X Direction
/// </summary>
/// <value>The M31</value>
public double OffsetX
{
get
{
return coeffs[_M31];
}
set
{
coeffs[_M31] = value;
}
}
/// <summary>
/// Gets or sets the Translation Offset in the Y Direction
/// </summary>
/// <value>The M32</value>
public double OffsetY
{
get
{
return coeffs[_M32];
}
set
{
coeffs[_M32] = value;
}
}
#endregion
}
还有一个 Matrix3x2 类
public class Matrix3x2 : ICloneable
{
#region Local Variables
private double[] coeffs;
private const int _M11 = 0;
private const int _M12 = 1;
private const int _M21 = 2;
private const int _M22 = 3;
private const int _M31 = 4;
private const int _M32 = 5;
#endregion
#region Construction
/// <summary>
/// Initializes a new instance of the <see cref="Matrix3x2"/> class.
/// </summary>
public Matrix3x2()
{
coeffs = new double[6];
}
/// <summary>
/// Initializes a new instance of the <see cref="Matrix3x2"/> class.
/// </summary>
/// <param name="coefficients">The coefficients to initialise. The number of elements of the array should
/// be equal to 6, else an exception will be thrown</param>
public Matrix3x2(double[] coefficients)
{
if (coefficients.GetLength(0) != 6)
throw new Exception("Matrix3x2.Matrix3x2()",
"The number of coefficients passed in to the constructor must be 6");
coeffs = coefficients;
}
public Matrix3x2(double m11, double m12, double m21, double m22, double m31, double m32)
{
coeffs = new double[] { m11, m12, m21, m22, m31, m32 };
}
/// <summary>
/// Initializes a new instance of the <see cref="Matrix3x2"/> class. The IAffineTransformCoefficients
/// passed in is used to populate coefficients M11, M12, M21, M22, M31, M32.
/// </summary>
/// <param name="affineMatrix">The IAffineTransformCoefficients used to populate M11, M12, M21, M22, M31, M32</param>
public Matrix3x2(IAffineTransformCoefficients affineTransform)
{
coeffs = new double[] { affineTransform.M11, affineTransform.M12,
affineTransform.M21, affineTransform.M22,
affineTransform.OffsetX, affineTransform.OffsetY};
}
#endregion
#region Public Properties
/// <summary>
/// Gets or sets the M11 coefficient
/// </summary>
/// <value>The M11</value>
public double M11
{
get
{
return coeffs[_M11];
}
set
{
coeffs[_M11] = value;
}
}
/// <summary>
/// Gets or sets the M12 coefficient
/// </summary>
/// <value>The M12</value>
public double M12
{
get
{
return coeffs[_M12];
}
set
{
coeffs[_M12] = value;
}
}
/// <summary>
/// Gets or sets the M21 coefficient
/// </summary>
/// <value>The M21</value>
public double M21
{
get
{
return coeffs[_M21];
}
set
{
coeffs[_M21] = value;
}
}
/// <summary>
/// Gets or sets the M22 coefficient
/// </summary>
/// <value>The M22</value>
public double M22
{
get
{
return coeffs[_M22];
}
set
{
coeffs[_M22] = value;
}
}
/// <summary>
/// Gets or sets the M31 coefficient
/// </summary>
/// <value>The M31</value>
public double M31
{
get
{
return coeffs[_M31];
}
set
{
coeffs[_M31] = value;
}
}
/// <summary>
/// Gets or sets the M32 coefficient
/// </summary>
/// <value>The M32</value>
public double M32
{
get
{
return coeffs[_M32];
}
set
{
coeffs[_M32] = value;
}
}
#endregion
#region Public Methods
/// <summary>
/// Transforms the the ILocation passed in and returns the result in a new ILocation
/// </summary>
/// <param name="location">The location to transform</param>
/// <returns>The transformed location</returns>
public ILocation Transform(ILocation location)
{
// Perform the following equation:
//
// | x y 1 | | M11 M12 | |(xM11 + yM21 + M31) (xM12 + yM22 + M32)|
// * | M21 M22 | =
// | M31 M32 |
double x = location.X * coeffs[_M11] + location.Y * coeffs[_M21] + coeffs[_M31];
double y = location.X * coeffs[_M12] + location.Y * coeffs[_M22] + coeffs[_M32];
return new Location(x, y);
}
/// <summary>
/// Multiplies the 3x3 matrix passed in with the current 3x2 matrix
/// </summary>
/// <param name="x">The 3x3 Matrix X</param>
public void Multiply(Matrix3x3 lhs)
{
// Multiply the 3x3 matrix with the 3x2 matrix and store inside the current 2x3 matrix
//
// [a b c] [j k] [(aj + bl + cn) (ak + bm + co)]
// [d e f] * [l m] = [(dj + el + fn) (dk + em + fo)]
// [g h i] [n o] [(gj + hl + in) (gk + hm + io)]
// Get coeffs
double a = lhs.M11;
double b = lhs.M12;
double c = lhs.M13;
double d = lhs.M21;
double e = lhs.M22;
double f = lhs.M23;
double g = lhs.M31;
double h = lhs.M32;
double i = lhs.M33;
double j = coeffs[_M11];
double k = coeffs[_M12];
double l = coeffs[_M21];
double m = coeffs[_M22];
double n = coeffs[_M31];
double o = coeffs[_M32];
coeffs[_M11] = a * j + b * l + c * n;
coeffs[_M12] = a * k + b * m + c * o;
coeffs[_M21] = d * j + e * l + f * n;
coeffs[_M22] = d * k + e * m + f * o;
coeffs[_M31] = g * j + h * l + i * n;
coeffs[_M32] = g * k + h * m + i * o;
}
#endregion
#region ICloneable Members
/// <summary>
/// Creates a new object that is a copy of the current instance.
/// </summary>
/// <returns>
/// A new object that is a copy of this instance.
/// </returns>
public object Clone()
{
double[] coeffCopy = (double[])coeffs.Clone();
return new Matrix3x2(coeffCopy);
}
#endregion
#region IAffineTransformCoefficients Members
//
// NB: M11, M12, M21, M22 members of IAffineTransformCoefficients are implemented within the
// #region Public Properties directive
//
/// <summary>
/// Gets or sets the Translation Offset in the X Direction
/// </summary>
/// <value>The M31</value>
public double OffsetX
{
get
{
return coeffs[_M31];
}
set
{
coeffs[_M31] = value;
}
}
/// <summary>
/// Gets or sets the Translation Offset in the Y Direction
/// </summary>
/// <value>The M32</value>
public double OffsetY
{
get
{
return coeffs[_M32];
}
set
{
coeffs[_M32] = value;
}
}
#endregion
}
从这些我们可以使用对应于两个图像的点列表执行图像配准。为了阐明这意味着什么,假设您的全景照片具有相同的某些特征。两者都有大教堂的尖顶,都有一棵树。配准图像 A 到 B 的点将是每个图像中对应的 X、Y 位置,即:两个图像中尖顶的 XY 位置将是一对点。
现在有了这个点列表,我们可以计算我们的变换:
public Matrix3x2 ComputeForwardTransform(IList<Point> baselineLocations, IList<Point> registerLocations)
{
if (baselineLocations.Count < 3 || registerLocations.Count < 3)
{
throw new Exception("ComputeForwardTransform()",
"Unable to compute the forward transform. A minimum of 3 control point pairs are required");
}
if (baselineLocations.Count != registerLocations.Count)
{
throw new Exception("ComputeForwardTransform()",
"Unable to compute the forward transform. The number of control point pairs in baseline and registration results must be equal");
}
// To compute
// Transform = ((X^T * X)^-1 * X^T)U = (X^T * X)^-1 (X^T * U)
// X^T * X =
// [ Sum(x_i^2) Sum(x_i*y_i) Sum(x_i) ]
// [ Sum(x_i*y_i) Sum(y_i^2) Sum(y_i) ]
// [ Sum(x_i) Sum(y_i) Sum(1)=n ]
// X^T * U =
// [ Sum(x_i*u_i) Sum(x_i*v_i) ]
// [ Sum(y_i*u_i) Sum(y_i*v_i) ]
// [ Sum(u_i) Sum(v_i) ]
IList<Point> xy = baselineLocations;
IList<Point> uv = registerLocations;
double a = 0, b = 0, c = 0, d = 0, e = 0, f = 0, g = 0, h = 0, n = xy.Count;
double p = 0, q = 0, r = 0, s = 0, t = 0, u = 0;
for (int i = 0; i < n; i++)
{
// Compute sum of squares for X^T * X
a += xy[i].X * xy[i].X;
b += xy[i].X * xy[i].Y;
c += xy[i].X;
d += xy[i].X * xy[i].Y;
e += xy[i].Y * xy[i].Y;
f += xy[i].Y;
g += xy[i].X;
h += xy[i].Y;
// Compute sum of squares for X^T * U
p += xy[i].X * uv[i].X;
q += xy[i].X * uv[i].Y;
r += xy[i].Y * uv[i].X;
s += xy[i].Y * uv[i].Y;
t += uv[i].X;
u += uv[i].Y;
}
// Create matrices from the coefficients
Matrix3x2 uMat = new Matrix3x2(p, q, r, s, t, u);
Matrix3x3 xMat = new Matrix3x3(a, b, c, d, e, f, g, h, n);
// Invert X
Matrix3x3 xInv = xMat.Inverse;
// Perform the multiplication to get the transform
uMat.Multiply(xInv);
// Matrix uMat now holds the image registration transform to go from the current result to baseline
return uMat;
}
最后,上面的可以调用如下:
//其中xy1, xy2, xy3是第一个图像中的控制点,uv1, uv2, uv3是 //第二张图片中的对应对 Matrix3x2 result = ComputeForwardTransform(new [] {xy1, xy2, xy3}.new [] {uv1, uv2, uv3});
总之,希望对你有所帮助。我意识到它不是特定于 GDI+ 的,但确实详细讨论了如何使用 3x3 转换来注册图像,这可以在 GDI+ 和 WPF 中使用。实际上,我的硬盘驱动器某处深处有一个代码示例,如果您需要对上述内容进行说明,我很乐意多谈。
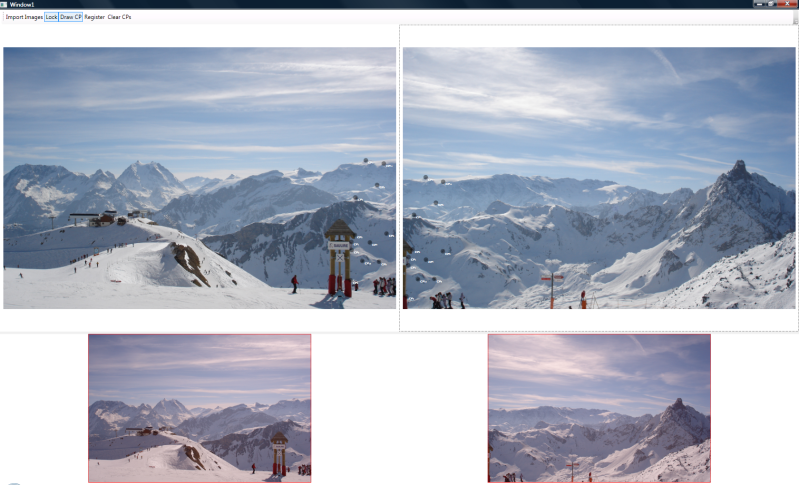
下方:显示拼接图像的演示

关于c# - 如何拼接很少重叠的图像?,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/8684440/