通过编译这个项目,我有几个问题:
来自:
#include <cv.h>
#include <highgui.h>
到:
#include <opencv.hpp>
#include <highgui.hpp>
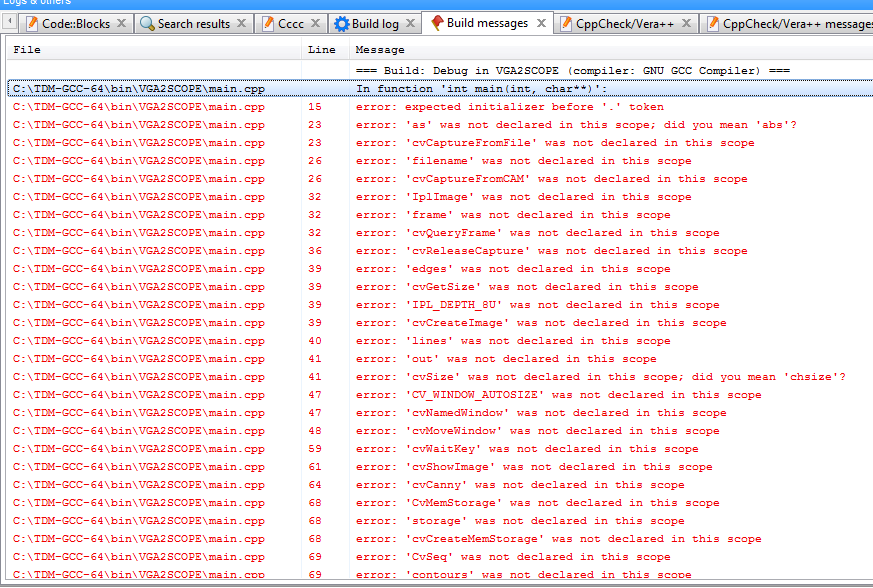
解决了包含问题但编译给出了更多错误:
我做错了什么?
下面的整个代码:
#include <stdio.h>
#include <unistd.h>
#include <opencv.hpp>
#include <highgui.hpp>
int main(int argc, char **argv)
{
// get command line parameters
if(argc < 6)
{
printf("Usage: %s <video> <vga window x> <vga window y> <vga width> <vga height>\n", argv[0]);
printf("Usage: %s <camera id> <vga window x> <vga window y> <vga width> <vga height>\n", argv[0]);
exit(0);
}
const char *filename = argv[1];
int vgaX = atoi(argv[2]);
int vgaY = atoi(argv[3]);
int vgaWidth = atoi(argv[4]);
int vgaHeight = atoi(argv[5]);
int outputPixelCount = vgaWidth * vgaHeight;
// opencv initializations
CvCapture* cap = cvCaptureFromFile(filename);
int isVideoFile = cap != 0;
if (!cap)
cap = cvCaptureFromCAM(atoi(filename));
if (!cap)
{
printf("Could not open file/camera!\n");
exit(1);
}
IplImage* frame = cvQueryFrame(cap); // get first frame for size
if (!frame)
{
printf("The Video is empty!\n");
cvReleaseCapture(&cap);
exit(1);
}
IplImage* edges = cvCreateImage(cvGetSize(frame), IPL_DEPTH_8U, 1);
IplImage* lines = cvCreateImage(cvGetSize(frame), IPL_DEPTH_8U, 3);
IplImage* out = cvCreateImage(cvSize(vgaWidth, vgaHeight), IPL_DEPTH_8U, 3);
int outStep = out->widthStep;
int outChannels = out->nChannels;
unsigned char *outData = (unsigned char*)out->imageData;
// position windows // TODO: make debug output windows optional?
cvNamedWindow("frame", CV_WINDOW_AUTOSIZE);
cvMoveWindow("frame", 0, 32);
cvNamedWindow("edges", CV_WINDOW_AUTOSIZE);
cvMoveWindow("edges", frame->width, 32);
cvNamedWindow("lines", CV_WINDOW_AUTOSIZE);
cvMoveWindow("lines", 2 * frame->width, 32);
cvNamedWindow("out", CV_WINDOW_AUTOSIZE);
cvMoveWindow("out", vgaX, vgaY);
while (42)
{
frame = cvQueryFrame(cap);
if (!frame || (cvWaitKey(1) & 0xff) == 'q')
break;
cvShowImage("frame", frame);
// edge detection
cvCanny(frame, edges, 128.0, 130.0, 3); // TODO: tweakable parameters?
cvShowImage("edges", edges);
// get contours
CvMemStorage *storage = cvCreateMemStorage(0);
CvSeq *contours;
int contourCount = cvFindContours(
edges, storage, &contours, sizeof(CvContour),
CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE, cvPoint(0, 0));
cvZero(lines);
cvDrawContours(lines, contours, cvScalar(32, 255, 32, 255), cvScalarAll(0), 100, 1, 8, cvPoint(0, 0));
cvShowImage("lines", lines);
// calculate total length over all contours
float contourLengthSum = 0.0f;
for(CvSeq *c = contours; c; c = c->h_next)
{
for(int i = 0; i < c->total - 1; i++)
{
CvPoint *p0 = CV_GET_SEQ_ELEM(CvPoint, c, i);
CvPoint *p1 = CV_GET_SEQ_ELEM(CvPoint, c, i + 1);
int dx = p1->x - p0->x;
int dy = p1->y - p0->y;
contourLengthSum += sqrtf(dx * dx + dy * dy);
}
}
float factor = (float)outputPixelCount / contourLengthSum;
// write output image
int cx = 0, cy = 0;
float xScale = 255.0f / frame->width;
float yScale = 255.0f / frame->height;
unsigned char *dp = &outData[1];
for(CvSeq *c = contours; c; c = c->h_next)
{
CvPoint *p0 = CV_GET_SEQ_ELEM(CvPoint, c, 0);
for(int i = 1; i < c->total; i++)
{
CvPoint *p1 = CV_GET_SEQ_ELEM(CvPoint, c, i);
float x0x1 = p1->x - p0->x;
float y0y1 = p1->y - p0->y;
int n = (int)(sqrtf(x0x1 * x0x1 + y0y1 * y0y1) * factor);
float x = (float)p0->x * xScale;
float y = 255.0f - (float)p0->y * yScale;
float dt = 1.0f / (float)(n - 1);
float dx = dt * x0x1 * xScale;
float dy = dt * -y0y1 * yScale;
for (int j = 0; j < n; j++)
{
dp[0] = (unsigned char)x;
dp[1] = (unsigned char)y;
x += dx;
y += dy;
dp += outChannels;
if (++cx == vgaWidth)
{
cx = 0;
dp = &outData[++cy * outStep + 1];
if (cy == vgaHeight)
goto full;
}
}
p0 = p1;
}
}
// fill last few pixels with last pixel value, if there are any left
for (; cy < vgaHeight; cy++)
{
for (;cx < vgaWidth; cx++)
{
outData[cy * outStep + cx * outChannels + 1] = 0;
outData[cy * outStep + cx * outChannels + 2] = 0;
}
cx = 0;
}
full:
cvReleaseMemStorage(&storage);
cvShowImage("out", out);
//if (isVideoFile)
// usleep(8000); // TODO: proper synchronization
}
cvReleaseImage(&out);
cvReleaseImage(&lines);
cvReleaseImage(&edges);
cvReleaseCapture(&cap);
return 0;
}
最佳答案
看起来您正在使用旧的 OpenCV API。它们被新方法取代。您的代码不适用于最近的 OpenCV 4.3.0。 cvCaptureFromFile , cvCaptureFromCAM和其他一些存在于 4.0.0-rc OpenCV 文档。
https://docs.opencv.org/4.0.0-rc/dd/d01/group__videoio__c.html
之后 4.0.0-rc OpenCV 的文档指向 videoio .
https://docs.opencv.org/master/dd/de7/group__videoio.html
进一步引用:
https://answers.opencv.org/question/55344/undeclared-indentifier-opencv-cvcapturefromcam-and-cvqueryframe/
此外,如果您在新的 OpenCV 版本中包含问题,请尝试,
#include <opencv2/opencv.hpp>
#include <opencv2/highgui.hpp>
关于c++ - OpenCV 编译问题,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/62122926/