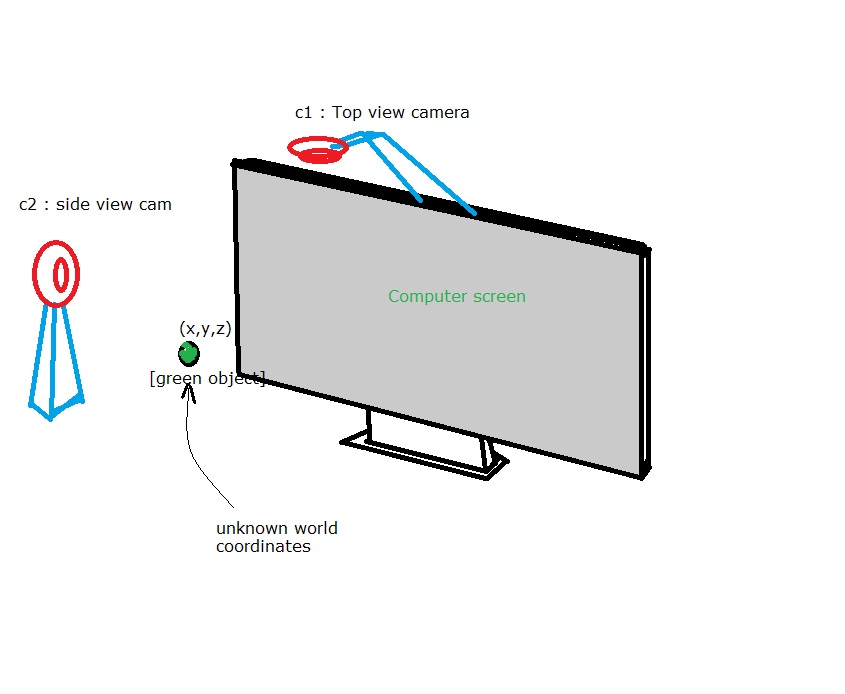
我有两个摄像头设置,如下图所示:
我通过此设置得到了什么:
- 此绿色对象的俯 View ,以
(x1,y1)作为其 2D 图像坐标。 - 此绿色对象的侧 View ,以
(x2,y2)作为其 2D 图像坐标。
如何通过这两个摄像头追踪/识别该绿色物体的真实世界 3D 坐标(x,y,z)(即顶 View 图像和侧 View 图像的组合)?
我知道如何使用 JavaCV/OpenCV 校准单个相机,但我不知道如何使用 JavaCV/OpenCV 执行立体校准其他内容。
通过两个摄像头进行此类立体校准的分步过程是什么?
这种立体校准过程的输出(例如,固有矩阵、失真等)是什么?如何使用该输出来计算这个绿色物体的真实世界 3D 坐标?
最佳答案
看完图片后,我认为您在为您的设置实现立体算法时可能会遇到问题。当相机几乎正面平行时,立体校正效果很好。对于您的相机设置,您几乎无法获得任何可以找到任何视差匹配的校正图像。
关于java - 使用两个相机进行立体校准和物体的 3D 重建?,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/11040693/