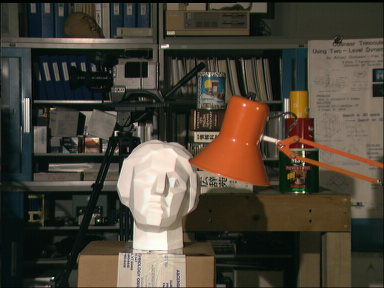
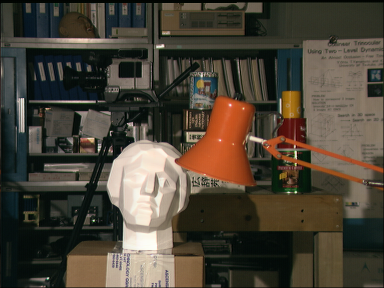
我有两张图片(左图和右图) 我想测量图像上的真实距离? 当我点击图像时,我会得到点击点到相机的真实距离。
左图:
右图:
我已经校准了两个图像。我想使用 EmguCV 获取与图像的距离。
这可能吗?
最佳答案
虽然我不知道 EmguCV 的具体细节,但我可以告诉您立体深度感知工作原理背后的概念,希望您可以实现某种修复。
从本质上讲,第一步是对图像的各个部分进行分割和匹配。您在这里要完成的是识别图像中每个部分“相同”的部分。例如,您希望能够识别每个图像中灯的中心。您用来执行此操作的功能集取决于您,但一个可能有帮助的基本功能是使用边缘检测器(如 canny 方法)并尝试匹配具有相似形状的轮廓。此外,另一种常见的技术是将图像分解成更小的 block 并匹配这些 block 中的特征。您使用的方法由您决定。
接下来,您可以计算两张图像中匹配对象与相机中心的距离。您需要对 x 和 y 方向都执行此操作。我们将称之为您的 x 和 y 差异。
现在,您需要知道拍摄照片的相机中心之间的距离。一旦你有了这个,你就可以做一些简单的三角来解决距离问题。对此 here 有一个相当简单的解释
同样,这都是概念性的,但重要的是要了解您所应用的算法是如何工作的。理解问题解决方案的第一步是理解问题本身。一旦您对问题和解决问题的过程有了充分的了解,使用任何库实现该过程应该会变得容易得多。祝你好运!
关于c# - 如何测量立体图像中的距离?,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/36666585/