我曾尝试使用 OpenCV HoughCircles 和 findContours 来检测圆,但是对于这些算法来说,圆不够完整或者图像中的噪声太多。或许我们只是对 OpenCV 不够熟悉。附件是我需要找到圆圈的图像。您应该能够用眼睛清楚地看到它,但是,圆检测算法似乎都不起作用。我发现应用中值滤波器可以清除大部分噪声,但即使在中值滤波器之后,算法也无法检测到圆。
请注意,我什至在这里查看并尝试了解决方案,因此它不是该问题的副本: Detect semicircle in OpenCV
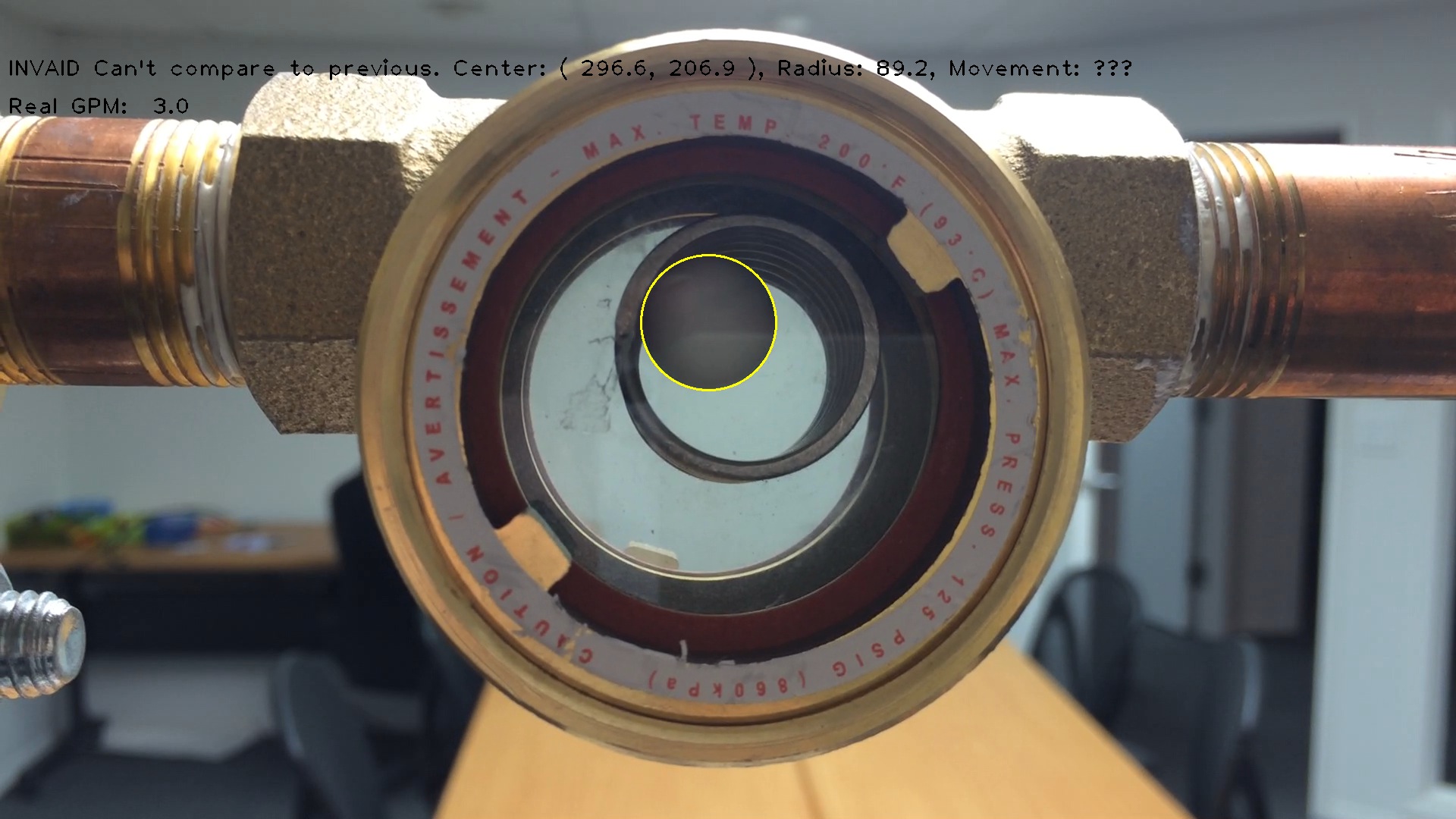
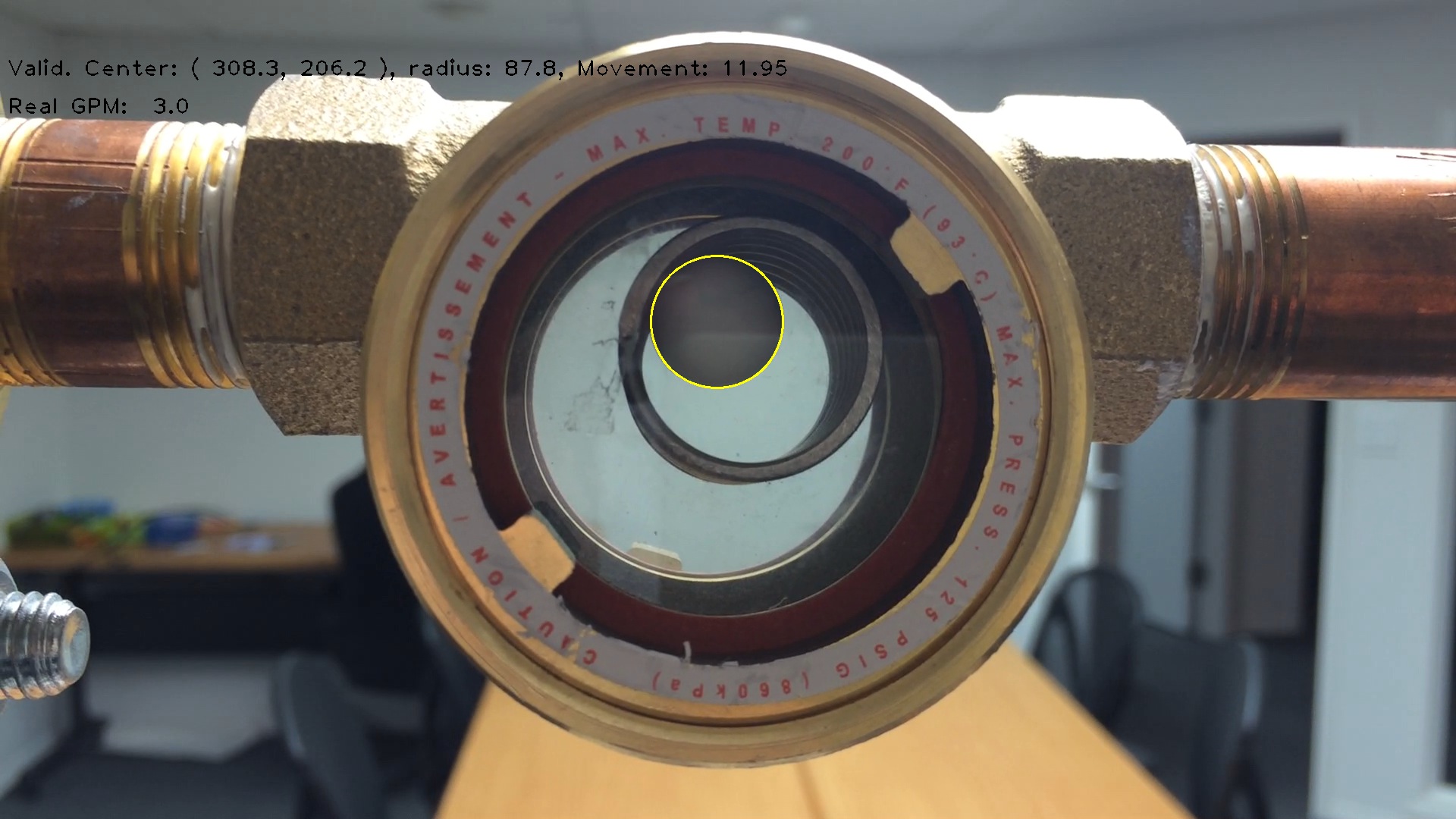
有什么想法吗?这是我需要使用的源图像。
此外,我想要检测圆的原因是我想只使用属于圆一部分的点进行计算。
{kind=link}
{kind=link}
最佳答案
给你:
我正在使用来自 Detect semi-circle in opencv 的第二个答案并稍微修改一下。此版本现在检测找到的最佳半圆(关于完整性)。
但首先我想告诉你为什么接受 link to Detect semi-circle in opencv stack overflow question 的答案在这里不起作用(除了噪音):你只有圆的边缘!如该问题所述,HoughCircle 函数在内部计算梯度,这对于前卫图像效果不佳。
但现在我是怎么做到的:
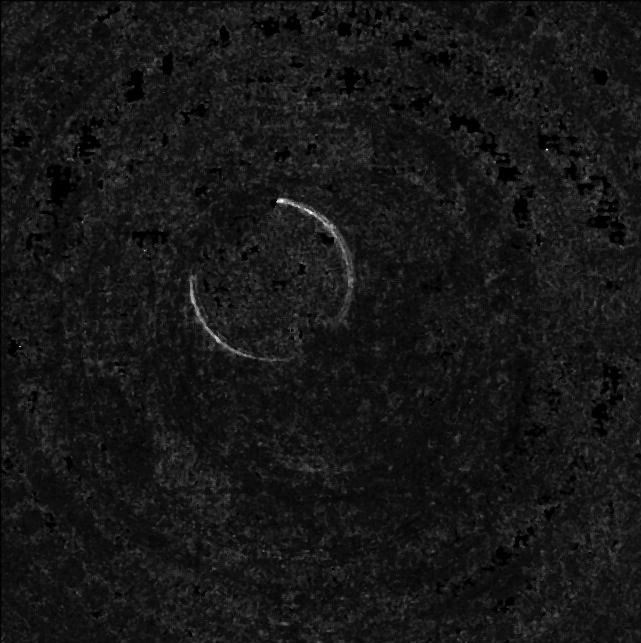
将其用作输入(您自己的中值滤波图像(我刚刚裁剪了它)):

首先,我“规范化”图像。我只是拉伸(stretch)值,最小的 val 是 0,最大的 val 是 255,导致这个结果:(也许一些真正的对比度增强更好)
之后我用一些固定阈值计算该图像的阈值(您可能需要编辑它并找到一种动态选择阈值的方法!更好的对比度增强可能会有所帮助)

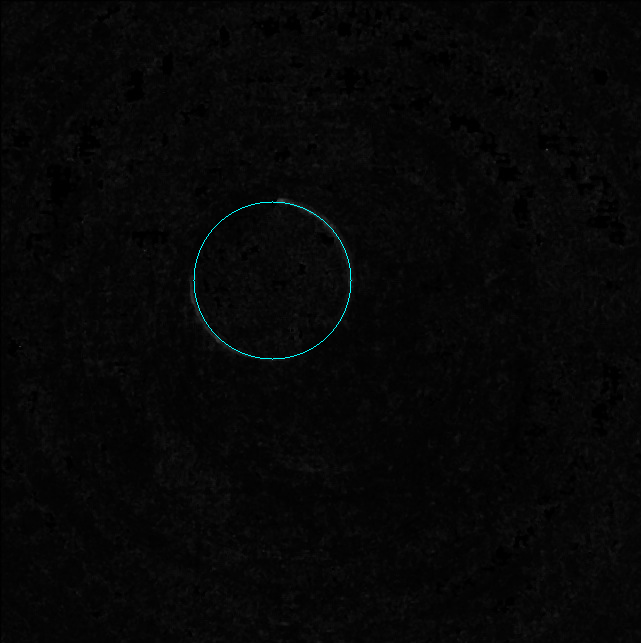
从这张图片中,我使用了一些简单的 RANSAC 圆检测(与我在链接的半圆检测问题中的回答非常相似),给你这个结果作为一个最好的半圆:
代码如下:
int main()
{
//cv::Mat color = cv::imread("../inputData/semi_circle_contrast.png");
cv::Mat color = cv::imread("../inputData/semi_circle_median.png");
cv::Mat gray;
// convert to grayscale
cv::cvtColor(color, gray, CV_BGR2GRAY);
// now map brightest pixel to 255 and smalles pixel val to 0. this is for easier finding of threshold
double min, max;
cv::minMaxLoc(gray,&min,&max);
float sub = min;
float mult = 255.0f/(float)(max-sub);
cv::Mat normalized = gray - sub;
normalized = mult * normalized;
cv::imshow("normalized" , normalized);
//--------------------------------
// now compute threshold
// TODO: this might ne a tricky task if noise differs...
cv::Mat mask;
//cv::threshold(input, mask, 0, 255, CV_THRESH_BINARY | CV_THRESH_OTSU);
cv::threshold(normalized, mask, 100, 255, CV_THRESH_BINARY);
std::vector<cv::Point2f> edgePositions;
edgePositions = getPointPositions(mask);
// create distance transform to efficiently evaluate distance to nearest edge
cv::Mat dt;
cv::distanceTransform(255-mask, dt,CV_DIST_L1, 3);
//TODO: maybe seed random variable for real random numbers.
unsigned int nIterations = 0;
cv::Point2f bestCircleCenter;
float bestCircleRadius;
float bestCirclePercentage = 0;
float minRadius = 50; // TODO: ADJUST THIS PARAMETER TO YOUR NEEDS, otherwise smaller circles wont be detected or "small noise circles" will have a high percentage of completion
//float minCirclePercentage = 0.2f;
float minCirclePercentage = 0.05f; // at least 5% of a circle must be present? maybe more...
int maxNrOfIterations = edgePositions.size(); // TODO: adjust this parameter or include some real ransac criteria with inlier/outlier percentages to decide when to stop
for(unsigned int its=0; its< maxNrOfIterations; ++its)
{
//RANSAC: randomly choose 3 point and create a circle:
//TODO: choose randomly but more intelligent,
//so that it is more likely to choose three points of a circle.
//For example if there are many small circles, it is unlikely to randomly choose 3 points of the same circle.
unsigned int idx1 = rand()%edgePositions.size();
unsigned int idx2 = rand()%edgePositions.size();
unsigned int idx3 = rand()%edgePositions.size();
// we need 3 different samples:
if(idx1 == idx2) continue;
if(idx1 == idx3) continue;
if(idx3 == idx2) continue;
// create circle from 3 points:
cv::Point2f center; float radius;
getCircle(edgePositions[idx1],edgePositions[idx2],edgePositions[idx3],center,radius);
// inlier set unused at the moment but could be used to approximate a (more robust) circle from alle inlier
std::vector<cv::Point2f> inlierSet;
//verify or falsify the circle by inlier counting:
float cPerc = verifyCircle(dt,center,radius, inlierSet);
// update best circle information if necessary
if(cPerc >= bestCirclePercentage)
if(radius >= minRadius)
{
bestCirclePercentage = cPerc;
bestCircleRadius = radius;
bestCircleCenter = center;
}
}
// draw if good circle was found
if(bestCirclePercentage >= minCirclePercentage)
if(bestCircleRadius >= minRadius);
cv::circle(color, bestCircleCenter,bestCircleRadius, cv::Scalar(255,255,0),1);
cv::imshow("output",color);
cv::imshow("mask",mask);
cv::waitKey(0);
return 0;
}
使用这些辅助函数:
float verifyCircle(cv::Mat dt, cv::Point2f center, float radius, std::vector<cv::Point2f> & inlierSet)
{
unsigned int counter = 0;
unsigned int inlier = 0;
float minInlierDist = 2.0f;
float maxInlierDistMax = 100.0f;
float maxInlierDist = radius/25.0f;
if(maxInlierDist<minInlierDist) maxInlierDist = minInlierDist;
if(maxInlierDist>maxInlierDistMax) maxInlierDist = maxInlierDistMax;
// choose samples along the circle and count inlier percentage
for(float t =0; t<2*3.14159265359f; t+= 0.05f)
{
counter++;
float cX = radius*cos(t) + center.x;
float cY = radius*sin(t) + center.y;
if(cX < dt.cols)
if(cX >= 0)
if(cY < dt.rows)
if(cY >= 0)
if(dt.at<float>(cY,cX) < maxInlierDist)
{
inlier++;
inlierSet.push_back(cv::Point2f(cX,cY));
}
}
return (float)inlier/float(counter);
}
inline void getCircle(cv::Point2f& p1,cv::Point2f& p2,cv::Point2f& p3, cv::Point2f& center, float& radius)
{
float x1 = p1.x;
float x2 = p2.x;
float x3 = p3.x;
float y1 = p1.y;
float y2 = p2.y;
float y3 = p3.y;
// PLEASE CHECK FOR TYPOS IN THE FORMULA :)
center.x = (x1*x1+y1*y1)*(y2-y3) + (x2*x2+y2*y2)*(y3-y1) + (x3*x3+y3*y3)*(y1-y2);
center.x /= ( 2*(x1*(y2-y3) - y1*(x2-x3) + x2*y3 - x3*y2) );
center.y = (x1*x1 + y1*y1)*(x3-x2) + (x2*x2+y2*y2)*(x1-x3) + (x3*x3 + y3*y3)*(x2-x1);
center.y /= ( 2*(x1*(y2-y3) - y1*(x2-x3) + x2*y3 - x3*y2) );
radius = sqrt((center.x-x1)*(center.x-x1) + (center.y-y1)*(center.y-y1));
}
std::vector<cv::Point2f> getPointPositions(cv::Mat binaryImage)
{
std::vector<cv::Point2f> pointPositions;
for(unsigned int y=0; y<binaryImage.rows; ++y)
{
//unsigned char* rowPtr = binaryImage.ptr<unsigned char>(y);
for(unsigned int x=0; x<binaryImage.cols; ++x)
{
//if(rowPtr[x] > 0) pointPositions.push_back(cv::Point2i(x,y));
if(binaryImage.at<unsigned char>(y,x) > 0) pointPositions.push_back(cv::Point2f(x,y));
}
}
return pointPositions;
}
编辑:还有一件事:速度性能在很大程度上取决于maxNrOfIterations。如果这很重要,您真的应该阅读有关 RANSAC 的内容以及何时停止它。因此,您可能能够尽早确定找到的圆圈是否正确,而无需测试任何其他圆圈;)
关于OpenCV 检测带有噪声的部分圆,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/26222525/