我正在开发一个基于传感器数据计算位置的安卓应用
加速度计 --> 计算线性加速度
磁力计 + 加速度计 --> 运动方向
初始位置将从 GPS(纬度 + 经度)获取。
现在根据传感器的读数,我需要计算智能手机的新位置:
我的算法如下 - (但不是计算准确位置):请帮助我改进它。
注意: 我的算法代码是用 C# 编写的(我将传感器数据发送到服务器 - 数据存储在数据库中。我正在计算服务器上的位置)
所有 DateTime 对象都是使用时间戳计算的 - 从 01-01-1970
var prevLocation = ServerHandler.getLatestPosition(IMEI);
var newLocation = new ReceivedDataDTO()
{
LocationDataDto = new LocationDataDTO(),
UsersDto = new UsersDTO(),
DeviceDto = new DeviceDTO(),
SensorDataDto = new SensorDataDTO()
};
//First Reading
if (prevLocation.Latitude == null)
{
//Save GPS Readings
newLocation.LocationDataDto.DeviceId = ServerHandler.GetDeviceIdByIMEI(IMEI);
newLocation.LocationDataDto.Latitude = Latitude;
newLocation.LocationDataDto.Longitude = Longitude;
newLocation.LocationDataDto.Acceleration = float.Parse(currentAcceleration);
newLocation.LocationDataDto.Direction = float.Parse(currentDirection);
newLocation.LocationDataDto.Speed = (float) 0.0;
newLocation.LocationDataDto.ReadingDateTime = date;
newLocation.DeviceDto.IMEI = IMEI;
// saving to database
ServerHandler.SaveReceivedData(newLocation);
return;
}
//If Previous Position not NULL --> Calculate New Position
**//Algorithm Starts HERE**
var oldLatitude = Double.Parse(prevLocation.Latitude);
var oldLongitude = Double.Parse(prevLocation.Longitude);
var direction = Double.Parse(currentDirection);
Double initialVelocity = prevLocation.Speed;
//Get Current Time to calculate time Travelling - In seconds
var secondsTravelling = date - tripStartTime;
var t = secondsTravelling.TotalSeconds;
//Calculate Distance using physice formula, s= Vi * t + 0.5 * a * t^2
// distanceTravelled = initialVelocity * timeTravelling + 0.5 * currentAcceleration * timeTravelling * timeTravelling;
var distanceTravelled = initialVelocity * t + 0.5 * Double.Parse(currentAcceleration) * t * t;
//Calculate the Final Velocity/ Speed of the device.
// this Final Velocity is the Initil Velocity of the next reading
//Physics Formula: Vf = Vi + a * t
var finalvelocity = initialVelocity + Double.Parse(currentAcceleration) * t;
//Convert from Degree to Radians (For Formula)
oldLatitude = Math.PI * oldLatitude / 180;
oldLongitude = Math.PI * oldLongitude / 180;
direction = Math.PI * direction / 180.0;
//Calculate the New Longitude and Latitude
var newLatitude = Math.Asin(Math.Sin(oldLatitude) * Math.Cos(distanceTravelled / earthRadius) + Math.Cos(oldLatitude) * Math.Sin(distanceTravelled / earthRadius) * Math.Cos(direction));
var newLongitude = oldLongitude + Math.Atan2(Math.Sin(direction) * Math.Sin(distanceTravelled / earthRadius) * Math.Cos(oldLatitude), Math.Cos(distanceTravelled / earthRadius) - Math.Sin(oldLatitude) * Math.Sin(newLatitude));
//Convert From Radian to degree/Decimal
newLatitude = 180 * newLatitude / Math.PI;
newLongitude = 180 * newLongitude / Math.PI;
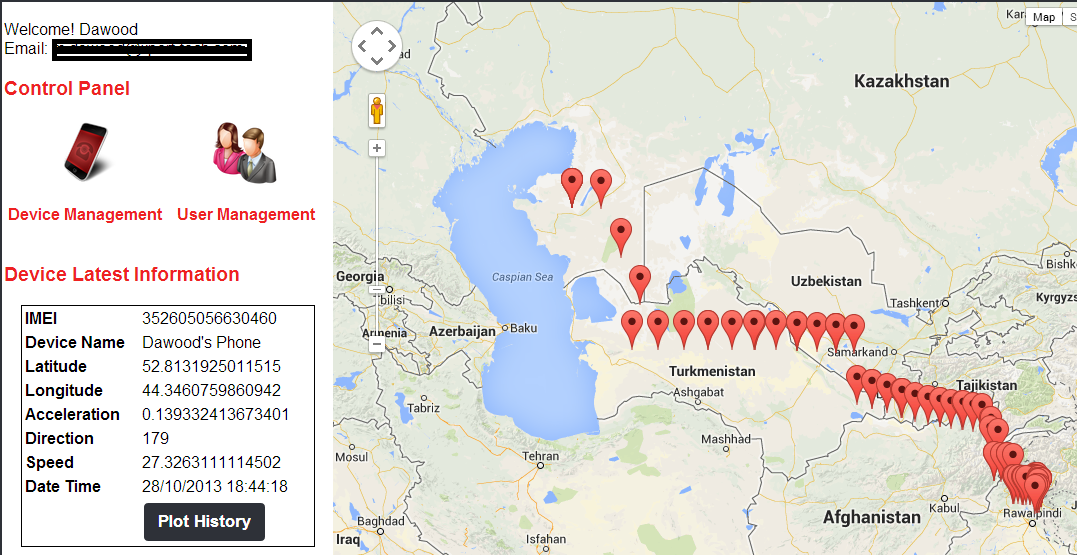
这是我得到的结果 --> 手机没有动。如您所见,speed 是 27.3263111114502 所以在计算 Speed 时有问题,但我不知道是什么
回答:
我找到了一个基于传感器计算位置的解决方案:我在下面发布了一个答案。
如果您需要任何帮助,请发表评论
这是与 GPS 对比的结果(注:GPS 为红色)

最佳答案
正如你们中的一些人提到的,您的方程式有误,但这只是错误的一部分。
牛顿 - 非相对论速度的达朗贝尔物理学规定了这一点:
// init values double ax=0.0,ay=0.0,az=0.0; // acceleration [m/s^2] double vx=0.0,vy=0.0,vz=0.0; // velocity [m/s] double x=0.0, y=0.0, z=0.0; // position [m] // iteration inside some timer (dt [seconds] period) ... ax,ay,az = accelerometer values vx+=ax*dt; // update speed via integration of acceleration vy+=ay*dt; vz+=az*dt; x+=vx*dt; // update position via integration of velocity y+=vy*dt; z+=vz*dt;传感器可以旋转,因此必须应用方向:
// init values double gx=0.0,gy=-9.81,gz=0.0; // [edit1] background gravity in map coordinate system [m/s^2] double ax=0.0,ay=0.0,az=0.0; // acceleration [m/s^2] double vx=0.0,vy=0.0,vz=0.0; // velocity [m/s] double x=0.0, y=0.0, z=0.0; // position [m] double dev[9]; // actual device transform matrix ... local coordinate system (x,y,z) <- GPS position; // iteration inside some timer (dt [seconds] period) ... dev <- compass direction ax,ay,az = accelerometer values (measured in device space) (ax,ay,az) = dev*(ax,ay,az); // transform acceleration from device space to global map space without any translation to preserve vector magnitude ax-=gx; // [edit1] remove background gravity (in map coordinate system) ay-=gy; az-=gz; vx+=ax*dt; // update speed (in map coordinate system) vy+=ay*dt; vz+=az*dt; x+=vx*dt; // update position (in map coordinate system) y+=vy*dt; z+=vz*dt;gx,gy,gz是全局重力矢量(~9.81 m/s^2在地球上)- 在代码中,我的全局
Y轴指向上方,因此gy=-9.81和其余部分为0.0
测量时间很关键
必须尽可能经常检查加速度计(第二个是很长的时间)。我建议不要使用大于 10 毫秒的计时器周期来保持准确性,并且您应该不时地使用 GPS 值覆盖计算的位置。可以减少检查罗盘方向的频率,但要有适当的过滤
罗盘并不总是正确的
应针对某些峰值过滤罗盘值。有时它会读取错误的值,也可能会因电磁污染或金属环境而关闭。在那种情况下,可以在移动过程中通过 GPS 检查方向,并可以进行一些修正。例如,每分钟检查一次 GPS 并将 GPS 方向与指南针进行比较,如果它始终在某个角度,则添加或减去它。
为什么要在服务器上进行简单的计算???
讨厌在线浪费流量。是的,你可以在服务器上记录数据(但我仍然认为设备上的文件会更好)但是为什么要通过互联网连接限制位置功能???更不用说延误了......
[编辑 1] 附加说明
稍微修改了上面的代码。方向必须尽可能精确,以尽量减少累积误差。
陀螺仪比指南针更好(或者两者都用更好)。应过滤加速度。一些低通滤波应该没问题。移除重力后,我会将 ax、ay、az 限制为可用值并丢弃太小的值。如果接近低速也完全停止(如果它不是火车或真空运动)。这应该会降低漂移但会增加其他错误,因此必须在它们之间找到折衷方案。
即时添加校准。当过滤 acceleration = 9.81 或非常接近它时,设备可能静止不动(除非它是飞行器)。可以通过实际重力方向修正方位/方向。
关于c# - 我计算智能手机位置的算法 - GPS 和传感器,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/55165405/