我正在进行图像处理,我想根据角度、原点以及 x、y 和 z 坐标旋转 xyz 空间中的所有像素。
我只需要设置适当的矩阵 (4x4),然后就可以了。角度以度为单位,而不是弧度,x、y、z 都将从 -1 到 1( float )
编辑:
好的,这是我编写的代码,用于围绕由原点和 X、Y、Z 坐标定义的给定线进行旋转。
float ang = angD * (float)(Math.PI / 180); // from degrees to radians, if needed
//U = n*n(t) + cos(a)*(I-n*n(t)) + sin(a)*N(x).
var u = MatrixDouble.Identity(4); // 4x4 Identity Matrix
u = u.Multiply(Math.Cos(ang));
var n = new MatrixDouble(1, 4, new List<double> { x, y, z, 0 });
var nt = n.Transpose();
// This next part is the N(x) matrix. The data is inputted in Column
// first order and fills in the 4x4 matrix with the given 16 Doubles
var nx = new MatrixDouble(4, 4, new List<double> { 0, z, -y, 0, -z, 0, x, 0, y, -x, 0, 0, 0, 0, 0, 1 });
nx = nx.Multiply(Math.Sin(ang));
var ret = nt.Multiply(n);
ret[3, 3] = 1;
u = u.Subtract(ret);
u = ret.Add(u.Add(nx));
它有点复杂,我使用的是自定义 Matrix 库,但使用任何正常运行的 Matrix 库应该都不会太难实现。
哎呀,很多数学知识!
最佳答案
完整的旋转矩阵是在 https://sites.google.com/site/glennmurray/glenn-murray-ph-d/rotation-matrices-and-formulas/rotation-about-an-arbitrary-axis-in-3-dimensions 推导和给出的.
来自论文:
5.2 绕原点旋转的简化矩阵
请注意,这里假设 (u, v, w) 是旋转轴的方向向量,并且 u^2 + v^2 + w^2 = 1。
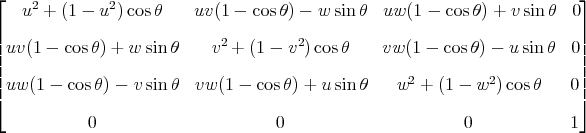
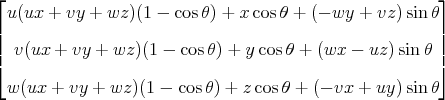
如果您有一个点 (x, y, z) 想要旋转,那么我们可以获得一个包含七个变量的函数来生成旋转后的点:
f(x、y、z、u、v、w、theta)=
该论文还包含用于围绕任意轴(不一定通过原点)旋转的矩阵和公式、在 Apache 许可下可用的 Java 代码,以及指向说明旋转的 Web 应用程序的链接。
关于c# - 旋转矩阵给定角度和 X、Y、Z 中的点,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/5188876/